var fs = require('fs');
var fn = '/run/shm/PowerMeter_Power.txt';
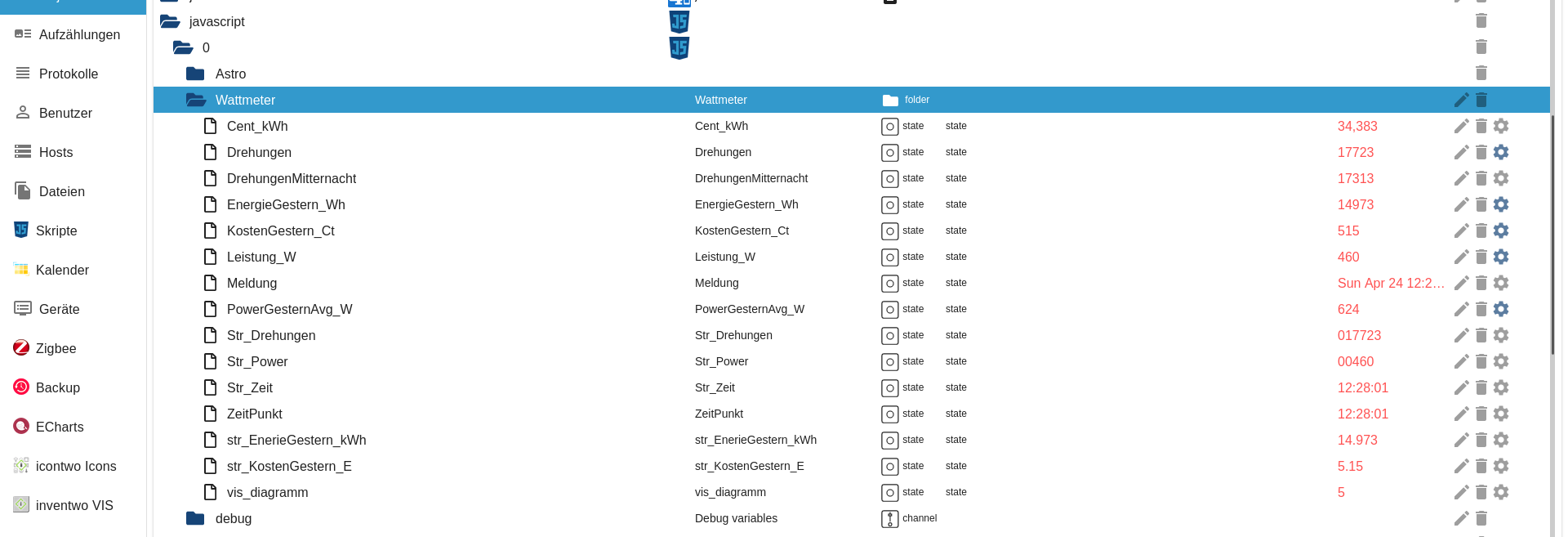
var
idPowermeterMeldung
= 'Wattmeter.Meldung';
var
idPowermeterPower
= 'Wattmeter.Leistung_W';
var idPowermeterRotations
= 'Wattmeter.Drehungen';
var idPowermeterRotationsNight =
'Wattmeter.DrehungenMitternacht';
var
idPowermeterTime
= 'Wattmeter.ZeitPunkt';
var
idPowermeterEnergie
= 'Wattmeter.EnergieGestern_Wh';
var
idPowermeterKosten
= 'Wattmeter.KostenGestern_Ct';
var
idPowermeterTarif
= 'Wattmeter.Cent_kWh';
function getPowerMeter() {
// Leistung in Watt
fs.readFile(fn, 'utf8',
function(error, data) {
if(error)
log('Fehler beim Lesen von ' + fn, 'error');
//Sun Apr 10
13:20:01 2022 W=00520W Ro:002115
else {
setState(idPowermeterMeldung,
data);
const words = data.split(' ');
var S1, S2, S3, S4;
var P = 0;
S1 = words[3]; // Zeit
S4 = words[4]; // Jahr
P = data.indexOf('W=');
S2 = data.substr(P+2, 5);
P = data.indexOf('Ro:');
S3 = data.substr(P+3, 6);
//Wed Apr 13 07:57:01 2022 W=00600W
Ro:005105
setState('Wattmeter.Str_Zeit',
S1); //07:57:01
setState('Wattmeter.Str_Power', S2);
//00600
setState('Wattmeter.Str_Drehungen', S3);//005105
// Zeit
setState(idPowermeterTime,
S1);
//
Power
setState(idPowermeterPower, parseFloat(S2));
// Drehungen
setState(idPowermeterRotations, parseFloat(S3));
}
});
}
function getDaylyEnergy() {
var DrehAlt=0, DrehNeu=0, Energie=0,
Tarif=0, Kosten=0, PowerAvg=0;
// alten und aktuellen Drehungswert
lesen, ist ein 6-stelliger Dezimalzähler
DrehAlt =
getState(idPowermeterRotationsNight).val;
DrehNeu =
getState(idPowermeterRotations).val;
// Tarif in Cent pro kWh lesen
Tarif =
getState(idPowermeterTarif).val;
// neuen Drehungswert speichern
setState(idPowermeterRotationsNight,
DrehNeu);
// TagesEnergie berechnen und
speichern, 75 U/kWh, außer bei Zählerüberlauf
if (DrehNeu > DrehAlt) {
Energie =
(DrehNeu - DrehAlt)* 1000 / 75;
Kosten
= Math.round(Energie * Tarif / 1000); // cent
Energie =
Math.round(Energie);
setState(idPowermeterEnergie, Energie);
setState(idPowermeterKosten, Kosten);
Kosten =
Kosten/100; // Euro
setState('Wattmeter.str_KostenGestern_E',
Kosten.toFixed(2));
PowerAvg =
Energie/24;
PowerAvg =
Math.round(PowerAvg);
Energie =
Energie/1000; // kWh
setState('Wattmeter.str_EnerieGestern_kWh',
Energie.toFixed(3));
setState('Wattmeter.PowerGesternAvg_W',
PowerAvg);
}
}
schedule('*/1 * * * *', getPowerMeter); // Jede
Minute
schedule('11 0 * * *', getDaylyEnergy); // um 0:11
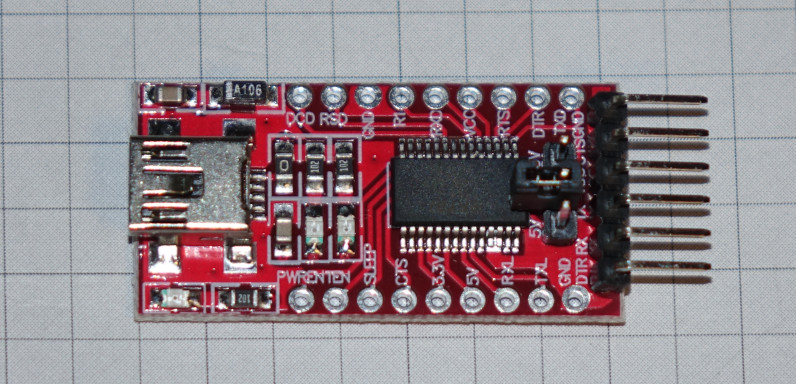
|

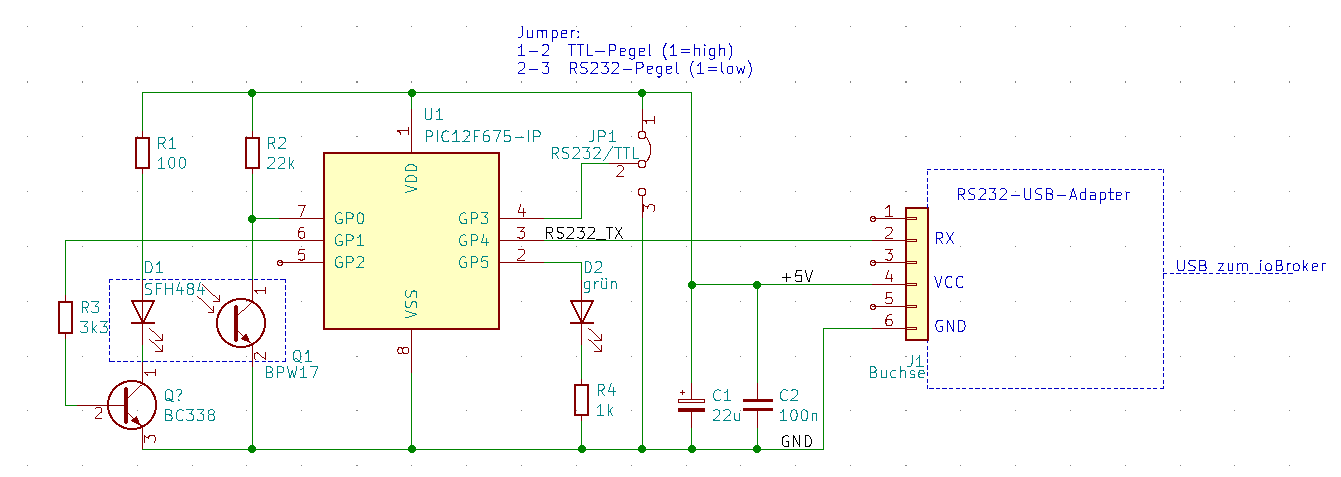
 Gehäusebauform hat der Fototransistor dabei deutlich
mehr von der Länge seiner Anschlusspins behalten dürfen. Über beide
Bauteile habe ich einzeln schwarzen Isolierschlauch gesteckt, der
erst auf dem Deckglas endet. Das dient der optischen Isolation der
Bauteile voneinander. Befindet sich bei eingeschalteter LED der
reflektierende Teil der Drehscheibe unter dem Sensor, so liegt die Spannung an GP0 bei etwa 0V.
Befindet sich aber der rote Teil der Drehscheibe unter dem Sensor, so steigt die Spannung an GP0 auf etwa 1..2 V.
(Jeweils während der 200 us langen Leuchtzeit der LED gemessen.
Gehäusebauform hat der Fototransistor dabei deutlich
mehr von der Länge seiner Anschlusspins behalten dürfen. Über beide
Bauteile habe ich einzeln schwarzen Isolierschlauch gesteckt, der
erst auf dem Deckglas endet. Das dient der optischen Isolation der
Bauteile voneinander. Befindet sich bei eingeschalteter LED der
reflektierende Teil der Drehscheibe unter dem Sensor, so liegt die Spannung an GP0 bei etwa 0V.
Befindet sich aber der rote Teil der Drehscheibe unter dem Sensor, so steigt die Spannung an GP0 auf etwa 1..2 V.
(Jeweils während der 200 us langen Leuchtzeit der LED gemessen.